正交矩阵的几何意义
最近看书突然想到一个问题,我们都知道如果将一个坐标系绕轴旋转的话相当于乘一个正交矩阵,即(X Y Z)=(x y z)α,正交矩阵α的三个特征值分别为1,[latex]e^{i\theta}[/latex],[latex]e^{-i\theta}[/latex].如果我们连续绕不同的轴旋转三次,则(X Y Z)=(x y z)αβγ=(x y z)B,那么B肯定也是一个正交矩阵。但是B的三个特征值绝对不是1和一对共轭复数,那B的特征值会是什么形式呢?难道是三个不同的实根?![]() 返回小木虫查看更多
返回小木虫查看更多
今日热帖





仅仅对于正交矩阵的几何意义发表下看法:在Rn欧式空间中,它对应着一种正交变换,是几个基本变换的复合所构成,分别是反射,旋转,置换。
它就是保持距离不变的变换。
对于特征值,如下图所示:
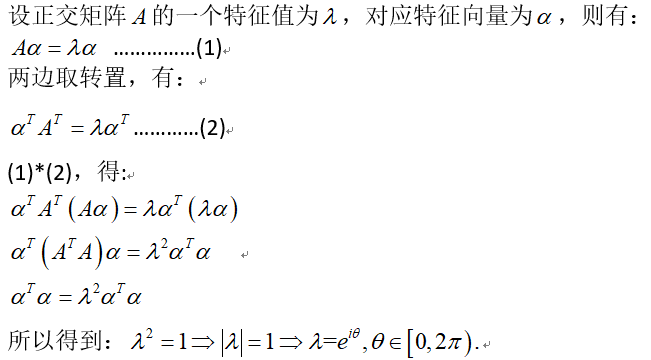
1.PNG
那么对于任意两个右手坐标系,是否能够只通过一次旋转互相转化呢?(假设原点相同)
对于任意两个右手坐标系,是可以通过旋转互相转化的(原点相同)。但一次可能不行。
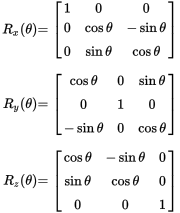
(X Y Z)=(x y z)T。这个T可以根据旋转角度来决定,T应该是如下三个矩阵的乘积:
rotation-matrices.png
上面三个矩阵中的theta对不同的旋转要取不同的值。
这实际上是分别绕X,Y,Z轴做了三次旋转,但这三个矩阵相乘也是一个正交阵,所以有没有可能只通过一次旋转就能得到
,
可以,这由 Euler 旋转定理保证。